
HydroWing è un progetto sperimentale sviluppato da Silver Innovation Lab, focalizzato su sistemi di galleggiamento e propulsione meccanica per la locomozione sull’acqua. Il progetto esplora soluzioni ingegneristiche orientate al controllo direzionale, alla stabilità dinamica e all’efficienza del movimento, attraverso componenti meccanici attivi e passivi.
Descrizione del progetto
Il progetto HydroWing nasce dall’esigenza di superare i limiti dei sistemi di galleggiamento passivo, introducendo un approccio meccanico alla propulsione e al controllo del movimento sull’acqua. Il sistema integra elementi di galleggiamento con dispositivi di propulsione meccanica attiva, progettati per sfruttare il movimento naturale del passo e migliorare avanzamento, stabilità direzionale ed efficienza dinamica. HydroWing rappresenta una piattaforma sperimentale orientata allo studio dell’interazione tra corpo, fluido e meccanismi di propulsione, attraverso prototipi fisici e validazione in condizioni reali di utilizzo.
Stato di sviluppo
Il progetto HydroWing si trova attualmente in una fase di sviluppo prototipale avanzato, con particolare attenzione alla progettazione, integrazione e verifica di sistemi di propulsione meccanica attiva. Le attività di sviluppo sono orientate alla validazione funzionale dei meccanismi di spinta, alla stabilità dinamica durante la locomozione e all’affidabilità delle soluzioni meccaniche adottate in condizioni reali di utilizzo. Il progetto mantiene un approccio sperimentale, basato su iterazioni progettuali progressive, test sul campo e analisi del comportamento dinamico del sistema complessivo.
Principi tecnici
- Propulsione meccanica a pinna integrata – Il sistema HydroWing utilizza una o più pinne meccaniche integrate nel galleggiante, progettate per trasformare il movimento del passo in spinta propulsiva sull’acqua, migliorando l’avanzamento senza ricorrere a motorizzazioni o sistemi elettrici.
- Cinematica del passo e conversione del movimento – Il progetto analizza e sfrutta la cinematica naturale del passo umano per attivare i meccanismi di propulsione, convertendo il movimento verticale e longitudinale in una spinta efficace sull’acqua, con l’obiettivo di massimizzare efficienza e controllo.
- Stabilità dinamica e controllo direzionale – La configurazione del galleggiante, l’orientamento delle superfici di spinta e l’integrazione di elementi direzionali consentono di migliorare la stabilità dinamica del sistema e il controllo della traiettoria durante la locomozione, riducendo oscillazioni indesiderate e dispersioni di energia.
- Modularità e regolazione dei componenti di propulsione – Il sistema HydroWing è concepito in modo modulare, consentendo la regolazione e l’intercambiabilità dei componenti di propulsione e degli elementi direzionali, al fine di adattare il comportamento dinamico del sistema alle caratteristiche dell’utente e alle condizioni operative.
- Prototipazione fisica e validazione sperimentale – Lo sviluppo di HydroWing si basa sulla realizzazione di prototipi fisici e su test in condizioni reali di utilizzo, finalizzati alla verifica dell’efficacia dei sistemi di propulsione, della stabilità dinamica e dell’affidabilità meccanica complessiva.
Schemi e concept di progetto
Sistema HydroWing – principio di propulsione passiva

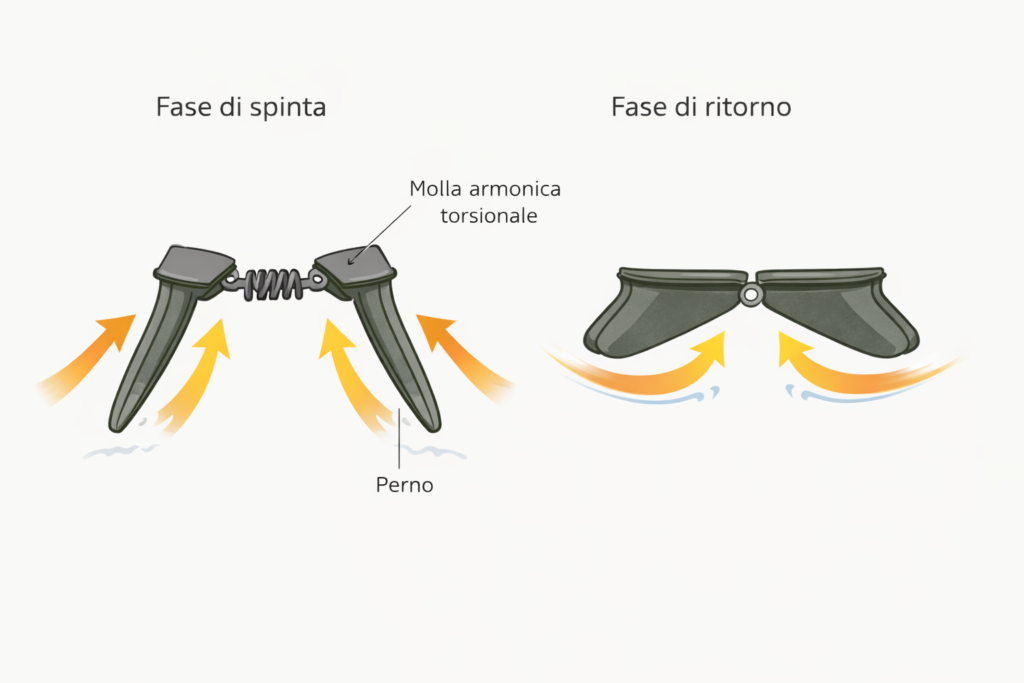
Rappresentazione funzionale del sistema HydroWing con pinna retrattile posteriore. La pinna, vincolata elasticamente, si orienta durante il passo generando propulsione passiva contribuendo alla stabilità direzionale del galleggiante.
Evoluzioni future – Roadmap tecnica
1 — Ottimizzazione della propulsione passiva
- Affinamento della geometria della pinna retrattile per massimizzare l’efficienza propulsiva durante il passo.
- Studio del comportamento dinamico della pinna in diverse velocità di camminata e condizioni di carico.
2 — Cinematica e risposta elastica
- Ottimizzazione del sistema di ritorno elastico (molla torsionale) per una risposta progressiva e controllata.
- Analisi dell’interazione tra cinematica del passo e angolo di apertura della pinna.
3 — Controllo direzionale e stabilità dinamica
- Integrazione e ottimizzazione dello skeg e delle superfici direzionali per migliorare la stabilità laterale.
- Riduzione delle oscillazioni indesiderate e miglioramento del controllo della traiettoria.
4 — Modularità del sistema e configurazioni funzionali
- Sviluppo di componenti intercambiabili (pinna, perno, elementi elastici) per diverse configurazioni d’uso.
- Adattamento del sistema a differenti utenti, pesi e scenari operativi.
5 — Prototipazione e validazione sul campo
- Realizzazione di prototipi evolutivi e test in condizioni reali di utilizzo.
- Iterazione progettuale basata su osservazioni sperimentali e verifiche funzionali.
La roadmap è soggetta a evoluzioni in funzione dei risultati sperimentali e delle validazioni meccaniche condotte sul campo.