SeaShoes – Sistema modulare di locomozione acquatica
SeaShoes è un sistema modulare di calzari galleggianti che integra propulsione meccanica e controllo dinamico della galleggiabilità per consentire la locomozione naturale sull’acqua mantenendo un approccio essenziale, sostenibile e orientato alla sperimentazione applicata.
Architettura modulare
Il sistema SeaShoes integra due tecnologie complementari: propulsione passiva e controllo dinamico della galleggiabilità.

HydroWing – Propulsione passiva a pinne retrattili
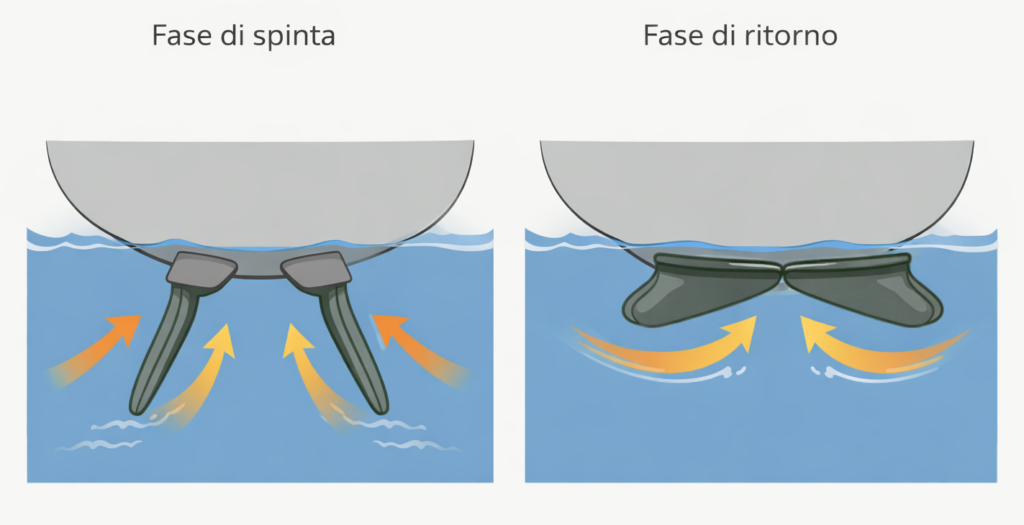
Le pinne meccaniche integrate nel galleggiante si aprono durante la fase di spinta e si richiudono nel ritorno, trasformando il passo in avanzamento idrodinamico naturale, senza motori né batterie.
Come funziona
- galleggiamento distribuito
- propulsione meccanica passiva
- stabilità dinamica controllata
Il sistema sfrutta l’interazione tra corpo e acqua per ottenere avanzamento naturale ed equilibrio, senza sistemi motorizzati.
I galleggianti HydroWing sono progettati per supportare il peso corporeo e favorire una progressione naturale del passo, sfruttando il movimento dell’utente e la risposta idrodinamica del sistema.
Stato di sviluppo
SeaShoes è attualmente in fase di prototipazione e test funzionali. Le attività di ricerca sono orientate alla validazione meccanica, all’ottimizzazione dell’efficienza idrodinamica e alla sicurezza operativa.
Funzionamento dinamico – HydroWing
I sistemi SeaShoes sfruttano l’interazione dinamica tra galleggiamento, movimento del passo e risposta idrodinamica, in partcolare HydroWing converte il passo in spinta propulsiva tramite pinne retrattili.
Schema funzionale della pinna retrattile
Pinne retratti in fase di spinta e ritorno
Schema tecnico della pinna retrattile HydroWing
Rappresentazione grafica della pinna retrattile e dei sui componenti nel sistema HydroWing. Lo schema ha finalità illustrative e non rappresenta una configurazione definitiva.
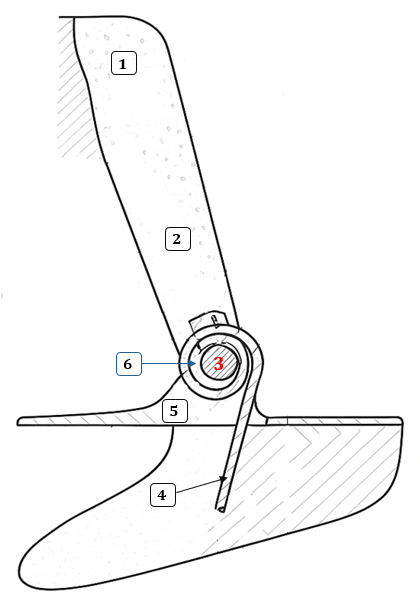
- Sezione del corpo inferiore di HydroWing contenente la sede del perno da 8 mm e della molla torsionale
- Pinna retrattile in ABS rinforzato in profilo idrodinamico con bordo smussato di 5 mm.
- Perno da 8 mm in acciaio inox AISI 316 come asse di rotazione.
- Molla torsionale in acciaio armonico posizionata coassialmente al perno.
- Fermo di rotazione con limitazione angolare (20° +- 2°) per blocco fine corsa.
- Guarnizione in neopreme per tenuta idrica e smorzamento vibrazioni.
HydroStep – Controllo dinamico della galleggiabilità
Micro-camere d’aria, sensori e valvole automatiche regolano la portanza in tempo reale, migliorando stabilità, equilibrio e comfort durante la camminata sull’acqua.
Funzionamento dinamico – HydroStep
Il sistema HydroStep utilizza micro-camere d’aria distribuite nel galleggiante, controllate da sensori di carico, pressione e assetto.
Le valvole automatiche modulano il volume d’aria in tempo reale, adattando la portanza alla fase del passo e mantenendo stabilità, equilibrio e comfort dinamico durante la locomozione sull’acqua.
Schema funzionale del controllo di galleggiamento
Architettura interna del sistema HydroStep
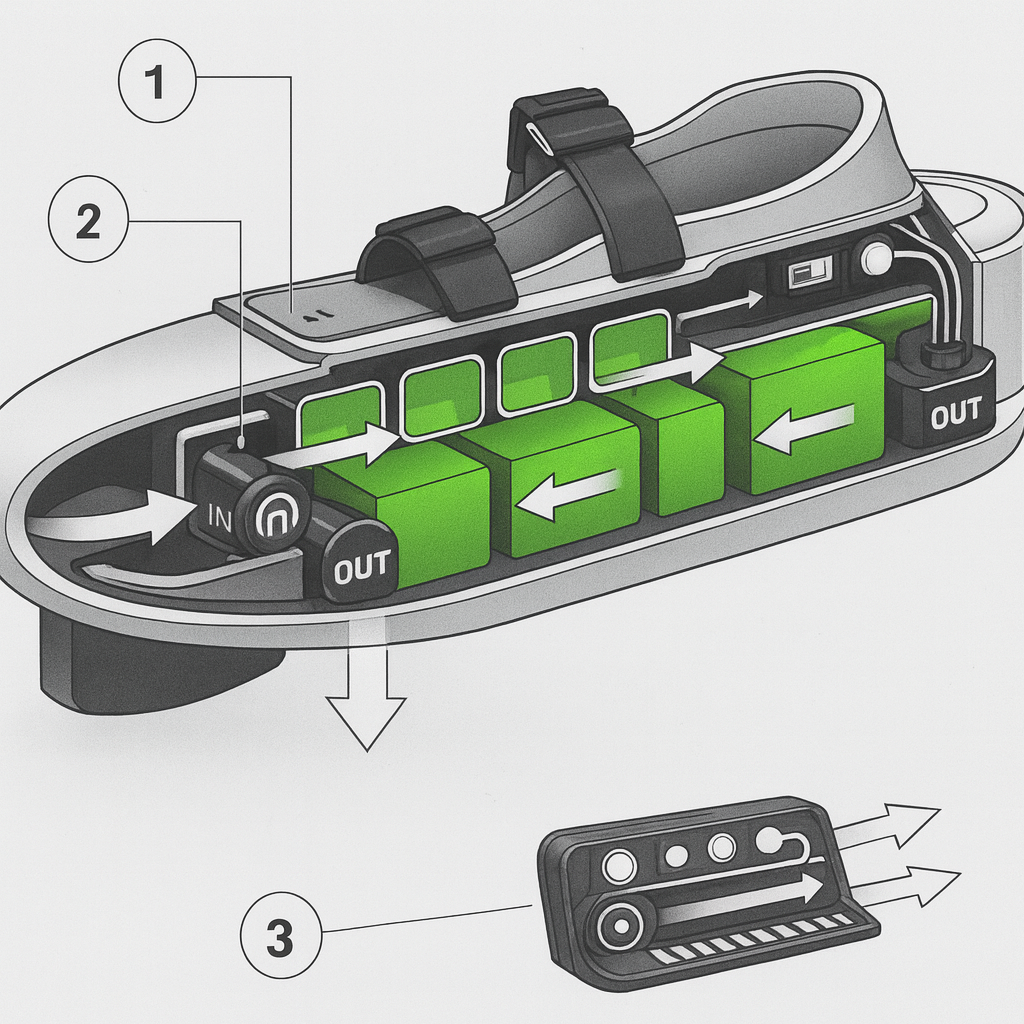
Legenda tecnica
1 — Microcamere d’aria
- Moduli di galleggiamento distribuiti per la regolazione locale della portanza.
2 — Valvole automatiche di flusso
- Gestione ingresso/uscita aria per il controllo dinamico del volume interno.
3 — Sistema sensori e controllo
- Sensore di carico – Sensore di pressione – Sensore di assetto – MCU di gestione.
Schema tecnico del sistema HydroStep
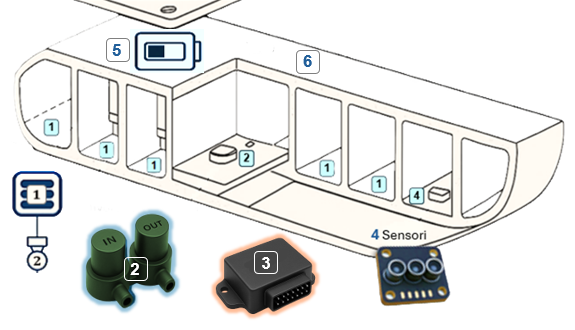
- Microcamere d’aria, con pareti interne rinforzate anti-deformazione, integrate nel corpo del galleggiante (ABS/EPP composito) del modulo HydroStep.
- Valvole automatiche a doppio stadio (ingresso/uscita separati).
- Unità di controllo elettronico (MCU) – (MCU) & Driver valvole
- Sensori ToF per la misurazione dell’immersione. Misurano con precisione la distanza tra il fondo del galleggiante e la superficie dell’acqua, migliorando la regolazione della portanza.
- Batteria ricaricabile
- Galleggiante in ABS/EPP composito.
Schema delle valvole automatiche a doppio stadio

Rappresentazione concettuale dei principali componenti del sistema SeaShoes e della loro integrazione funzionale. Lo schema ha finalità illustrative e non rappresenta una configurazione definitiva.