
HydroStep is an experimental project developed by Silver Innovation Lab, focused on the design of floating shoes for locomotion on water, based on innovative mechanical solutions and principles of dynamic stability.
The project is oriented toward experimentation with new floating and propulsion solutions, with particular emphasis on construction simplicity and real-world functionality.
Project scope
The project is not intended for electrical energy generation, but rather for the study of mechanical solutions aimed at stability, dynamic efficiency, and motion control.
Project description
HydroStep was conceived to overcome the limitations of traditional personal flotation solutions by introducing a modular and mechanically optimized system for locomotion on water.
The project analyzes the dynamic behavior of the moving body, integrating principles of distributed buoyancy, directional stability, and passive control, without relying on direct electrical energy generation.
Development status
The HydroStep project is currently in an advanced concept and prototyping phase, with particular focus on mechanical validation of the adopted solutions and performance verification under real operating conditions.
Development activities are oriented toward practical experimentation, construction simplification, and analysis of the system’s dynamic behavior during water locomotion.
Technical principles
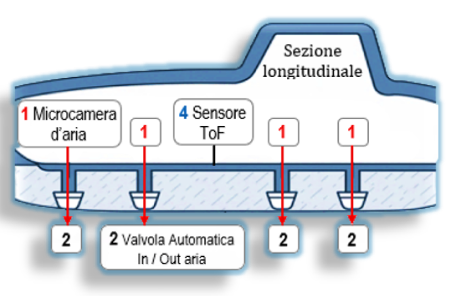
- Distributed and modular buoyancy – The HydroStep system adopts distributed buoyancy across compact and modular elements, designed to ensure static and dynamic stability during water locomotion, reducing roll and pitch effects.
- Dynamic stability during walking – The geometric configuration of the system and the presence of passive control surfaces contribute to maintaining balance during walking, improving dynamic stability even under motion and varying load conditions.
- Passive mechanical propulsion integrated into walking – Forward movement is achieved by exploiting the natural dynamics of human walking, converted into thrust through passive mechanical solutions, without the use of actuators or electrical generation systems.
- Construction simplicity and component modularity – The project prioritizes simple, easily replicable construction solutions, with modular components designed to facilitate experimentation, maintenance, and progressive system evolution
- Experimental approach based on physical prototypes – HydroStep development is based on the construction and testing of physical prototypes, used to validate design solutions in the field, analyze dynamic behavior, and guide subsequent design iterations.
Schematics and design concepts
Conceptual diagram of the HydroStep system
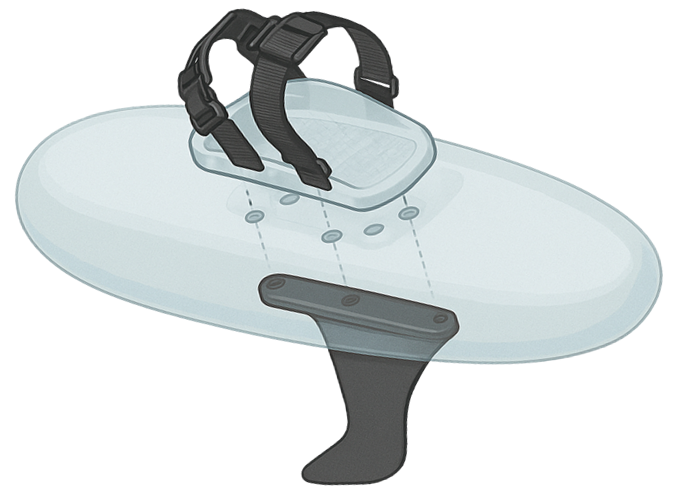
Simplified view of the modular floating structure with upper mounting plate and rear skeg, designed to improve dynamic stability and directional control during water locomotion.
Future developments – Technical roadmap
1 — Dynamic optimization
- Refinement of float geometry to improve static and dynamic stability.
- Analysis of system behavior under different load and usage conditions.
2 — System modularity
- Development of modular and interchangeable components (floats, skeg, plates).
- Configurations adaptable to different users and operational scenarios.
3 — Passive mechanical control
- Study of passive mechanical solutions for directional control and stability during movement.
- Integration of dynamic elements without actuators or electrical generation.
4 — Prototyping and validation
- Development of evolutionary prototypes and field testing.
- Design iteration guided by experimental observations and field verification.
5 — Simplification and scalability
- Rationalization of components and materials.
- Evaluation of industrialization in terms of repeatability, reliability, and maintenance.
The roadmap may evolve based on experimental results and mechanical validation conducted in the field.