
HydroWing is an experimental project developed by Silver Innovation Lab, focused on floating and mechanical propulsion systems for locomotion on water. The project explores engineering solutions aimed at directional control, dynamic stability, and movement efficiency, through the use of active and passive mechanical components
Project description
The HydroWing project was conceived to overcome the limitations of passive floating systems by introducing a mechanical approach to propulsion and motion control on water.
The system integrates buoyant elements with active mechanical propulsion devices, designed to exploit the natural motion of walking in order to improve forward movement, directional stability, and dynamic efficiency.
HydroWing represents an experimental platform dedicated to the study of the interaction between the human body, fluid dynamics, and propulsion mechanisms, through physical prototypes and validation under real operating conditions.
Development status
The HydroWing project is currently in an advanced prototyping phase, with particular focus on the design, integration, and verification of active mechanical propulsion systems.
Development activities are oriented toward functional validation of thrust mechanisms, dynamic stability during locomotion, and mechanical reliability under real-world usage conditions.
The project follows an experimental approach based on progressive design iterations, field testing, and analysis of the overall dynamic behavior of the system.
Technical principles
- Integrated mechanical fin propulsion. The HydroWing system uses one or more mechanically integrated fins within the floating structure, designed to convert the walking motion into propulsive thrust on water, improving forward movement without the use of motors or electrical systems
- Walking kinematics and motion conversion. The project analyzes and exploits the natural kinematics of human walking to activate propulsion mechanisms, converting vertical and longitudinal motion into effective thrust on water, with the goal of maximizing efficiency and control.
- Dynamic stability and directional control. the configuration of the floating body, the orientation of thrust surfaces, and the integration of directional elements contribute to improved dynamic stability and trajectory control during locomotion, reducing unwanted oscillations and energy losses.
- Modularity and adjustment of propulsion components. The HydroWing system is designed with a modular architecture, allowing adjustment and interchangeability of propulsion and directional components in order to adapt the system’s dynamic behavior to user characteristics and operating conditions.
- Physical prototyping and experimental validation. HydroWing development is based on the construction of physical prototypes and testing under real usage conditions, aimed at verifying propulsion effectiveness, dynamic stability, and overall mechanical reliability.
Schematics and design concepts
HydroWing system – passive propulsion principle

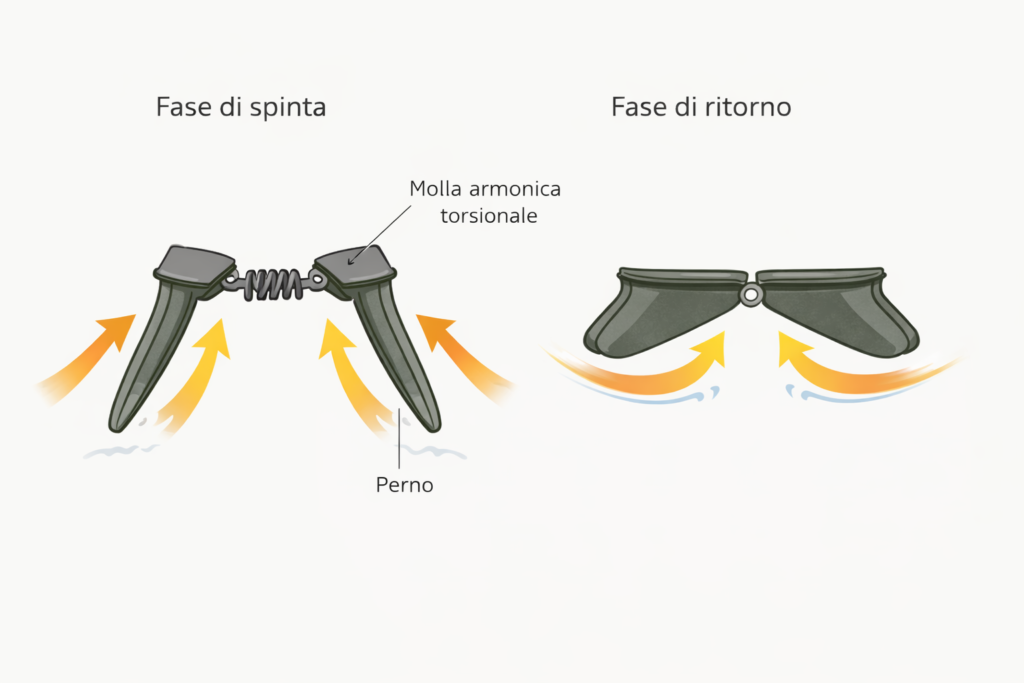
Functional representation of the HydroWing system with a rear retractable fin. The elastically constrained fin reorients during the walking motion, generating passive propulsion and contributing to directional stability.
Future developments – Technical roadmap
1 — Passive propulsion optimization
- Refinement of the retractable fin geometry to maximize propulsion efficiency during walking.
- Analysis of fin dynamic behavior at different walking speeds and load conditions.
2 — Kinematics and elastic response
- Optimization of the elastic return system (torsion spring) for progressive and controlled response.
- Analysis of the interaction between walking kinematics and fin opening angle.
3 — Directional control and dynamic stability
- Integration and optimization of the skeg and directional surfaces to improve lateral stability.
- Reduction of unwanted oscillations and improved trajectory control.
4 — System modularity and functional configurations
- Development of interchangeable components (fin, pin, elastic elements) for different usage configurations.Adaptation of the system to different users, weights, and operational scenarios.
5 — Prototyping and field validation
- Development of evolutionary prototypes and real-world testing.
- Design iteration based on experimental observations and functional validation.
The roadmap may evolve based on experimental results and mechanical validation conducted in the field.