SeaShoes – Modular Water Locomotion System
SeaShoes is a modular floating footwear system that combines passive propulsion and dynamic buoyancy control to enable natural locomotion on water, maintaining a simple, sustainable and experimentation-driven design approach.
Modular architecture
The SeaShoes system integrates two complementary technologies: passive hydrodynamic propulsion and dynamic buoyancy control.
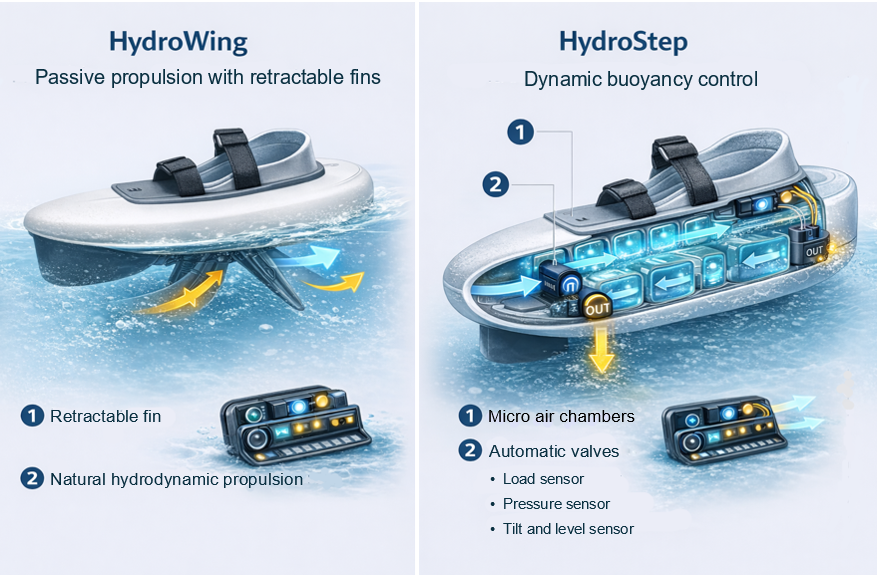
HydroWing – Passive retractable fin propulsion
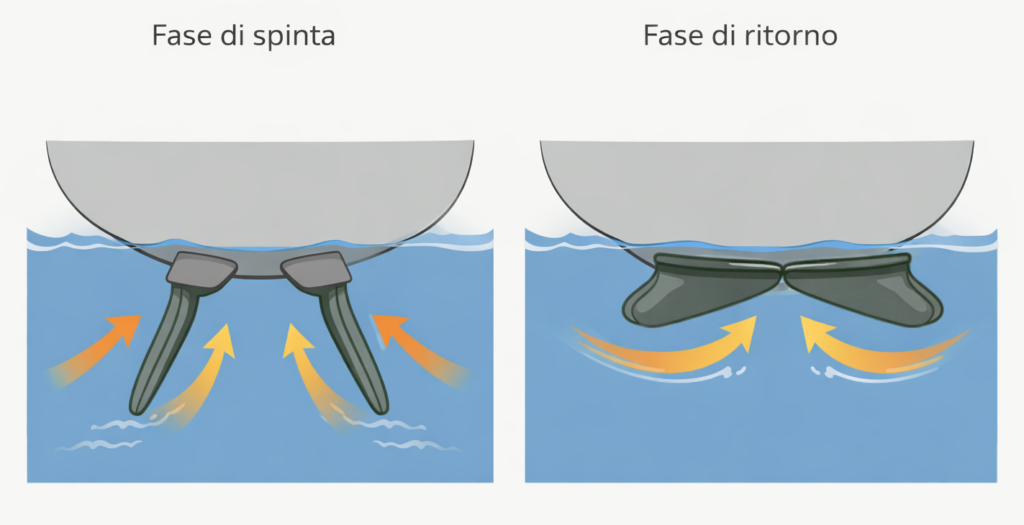
Integrated mechanical fins open during the push phase and close during recovery, converting the walking step into natural hydrodynamic thrust, without motors or batteries.
How it works
- distributed buoyancy
- passive mechanical propulsion
- dynamic stability control
The system exploits the interaction between body movement and water response to achieve forward motion and balance without powered systems.
HydroWing floats are designed to support body weight and promote natural stride progression, leveraging the user’s movement and the system’s hydrodynamic response.
Development status
SeaShoes is currently in the prototyping and functional testing phase. Research activities focus on mechanical validation, hydrodynamic efficiency optimization and operational safety.
Dynamic operation – HydroWing
SeaShoes systems leverage the dynamic interaction between buoyancy, walking motion, and hydrodynamic response. In particular, HydroWing converts each step into forward propulsive thrust through retractable fins.
Functional diagram of the retractable fin
Retractable fins during propulsion and recovery phases
HydroWing retractable fin – Technical diagram
Graphic representation of the retractable fin and its components within the HydroWing system. This diagram is for illustrative purposes only and does not represent a final configuration.
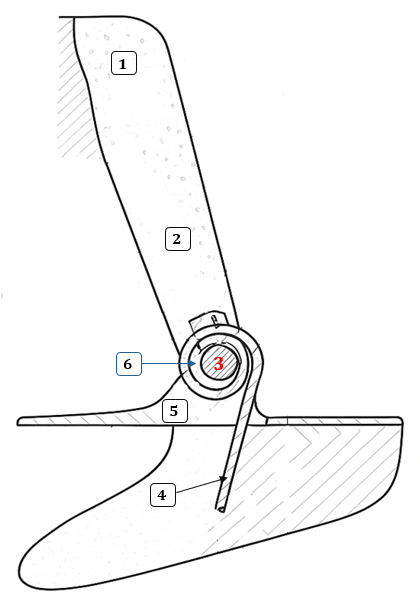
- Lower body section of the HydroWing housing the 8 mm pivot pin seat and torsion spring assembly.
- Retractable fin made of reinforced ABS with a hydrodynamic profile and 5 mm chamfered edge.
- 8 mm AISI 316 stainless steel pin acting as the rotational axis.
- Torsion spring made of spring steel, positioned coaxially with the pivot pin.
- Rotation stop with angular limitation (20° ± 2°) for end-of-stroke locking.
- Neoprene gasket for water sealing and vibration damping.
HydroStep – Dynamic buoyancy control
Air micro-chambers, sensors and automatic valves regulate buoyancy in real time, improving stability, balance and walking comfort on water.
Dynamic operation – HydroStep
HydroStep distributes multiple air chambers inside the float, monitored by load, pressure and attitude sensors.
Automatic valves continuously adjust internal air volume to adapt buoyancy during each step, ensuring stability and smooth motion.
Functional diagram of the buoyancy control system
Architettura interna del sistema HydroStep
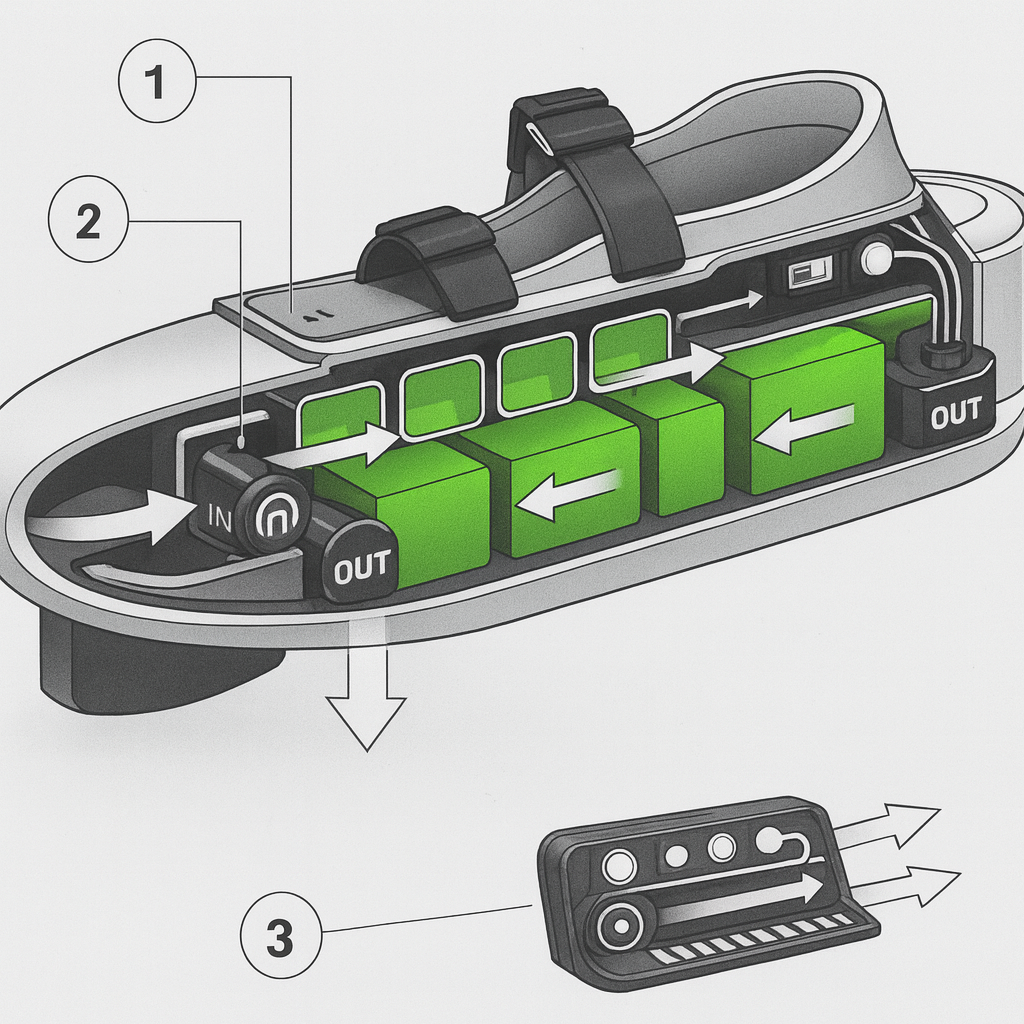
Technical legend
1 — Air micro-chambers
- Distributed flotation modules for local buoyancy regulation.
2 — Automatic flow valves
- Controlled air intake/outlet for dynamic internal volume management.
3 — Sensor and control systemo
- Load sensor – Pressure sensor – Attitude sensor – Control MCU.
Technical diagram of the HydroStep system
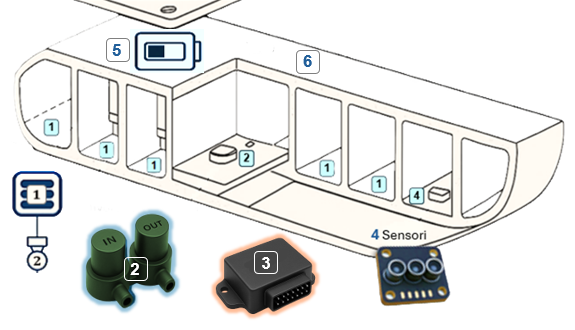
- Air micro-chambers with reinforced internal anti-deformation walls, integrated into the float body (ABS/EPP composite) of the HydroStep module.
- Dual-stage automatic valves (separate intake and exhaust).
- Electronic control unit (MCU) with dedicated valve drivers
- Time-of-Flight (ToF) sensors for precise immersion depth measurement, enabling accurate buoyancy control.
- Rechargeable battery pack.
- Float structure made of ABS/EPP composite.
Dual-stage automatic valve schematic

Conceptual layout of the primary SeaShoes system components and their functional integration. The diagram is for illustrative purposes only and does not depict the final design configuration.